分布式训练之四:并行策略
分布式训练之四:并行策略
- 五个维度的并行策略
- batch dimension
- hidden_state dimension
- sequence dimension
- model_layer dimension
- model_expert dimension
- 最佳训练配置
- 张量并行 Tensor Parallelism(TP)
- 序列并行 Sequence Parallelism (SP)
- 上下文并行 Context Parallelism (CP)
- 流水线并行 Pipeline parallelism (PP)
- 专家并行 Expert Parallelism (EP)
1. 五个维度的并行策略 5D Parallelization Strategies
1.1. 五个维度
- Data Parallelism (DP) -> batch维度
- ZeRO (Zero Redundancy Optimizer)
- ZeRO-1: optimizer state 分片
- ZeRO-2: optimizer state + gradient 分片
- ZeRO-3 / FSDP (Fully-Sharded Data Parallelism): optimizer state + gradient + parameter 分片
- ZeRO (Zero Redundancy Optimizer)
- Tensor Parallelism (TP) -> hidden_state维度
- Sequence Parallelism (SP) -> sequence维度
- Context Parallelism (CP) -> sequence维度
- Pipeline parallelism (PP) -> model_layer维度
- Expert Parallelism (EP) -> model_expert维度
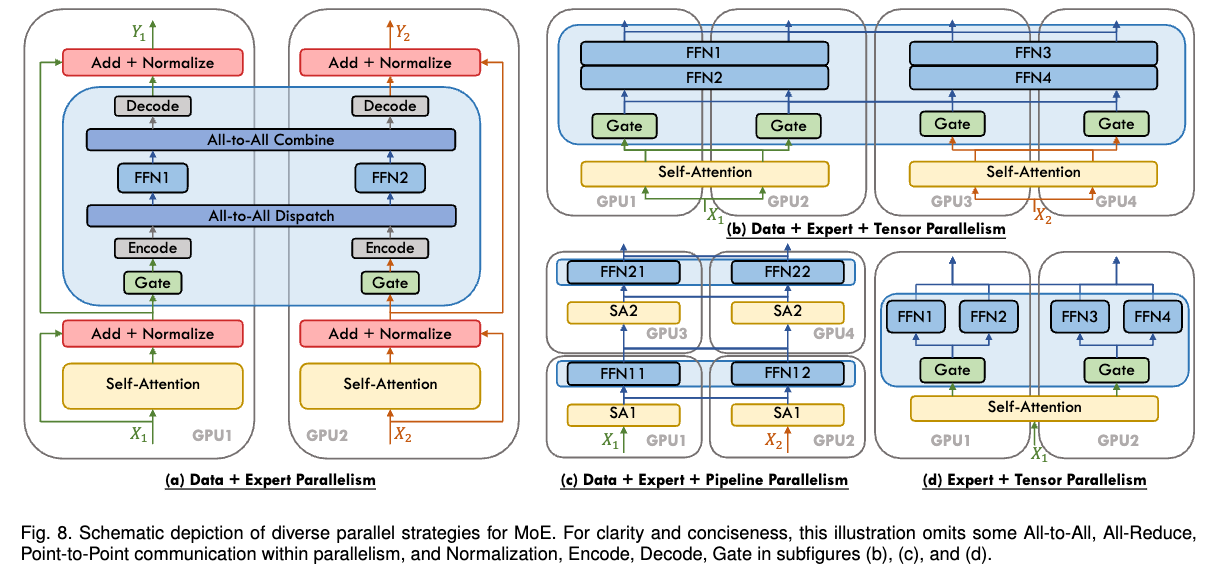
1.2. 多个并行策略的结合
- PP + ZeRO-1/ZeRO-2/ZeRO-3
- eg. the training of DeepSeek-v3 used PP combined with ZeRO-1
- TP & SP + PP
- TP & SP + ZeRO-3
- CP + EP
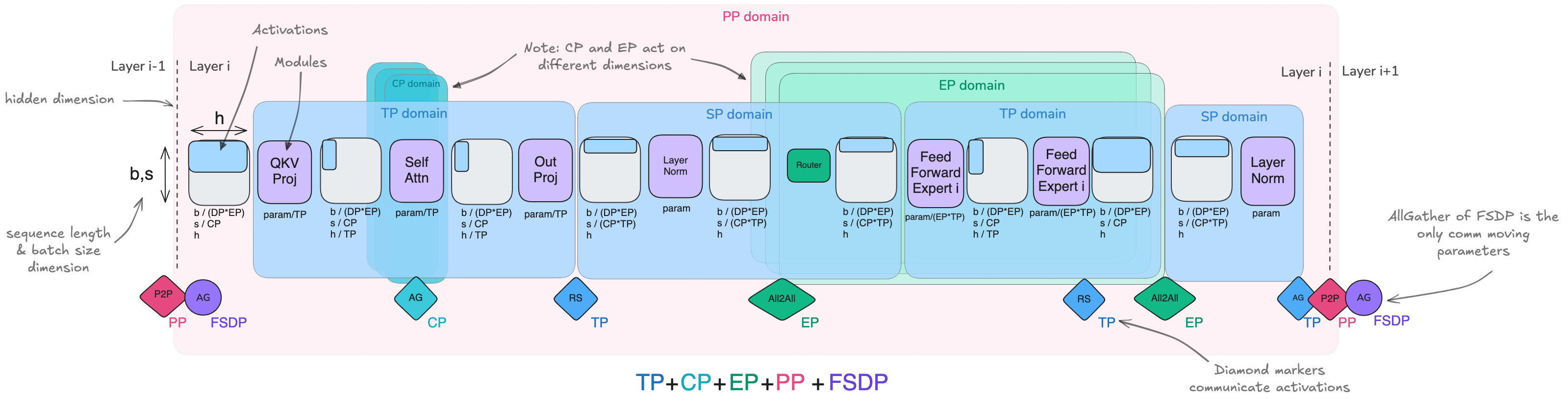
- TP & SP + CP + EP + PP + FSDP
最常用的三个并行策略(3D并行)
- DP
- TP
- PP
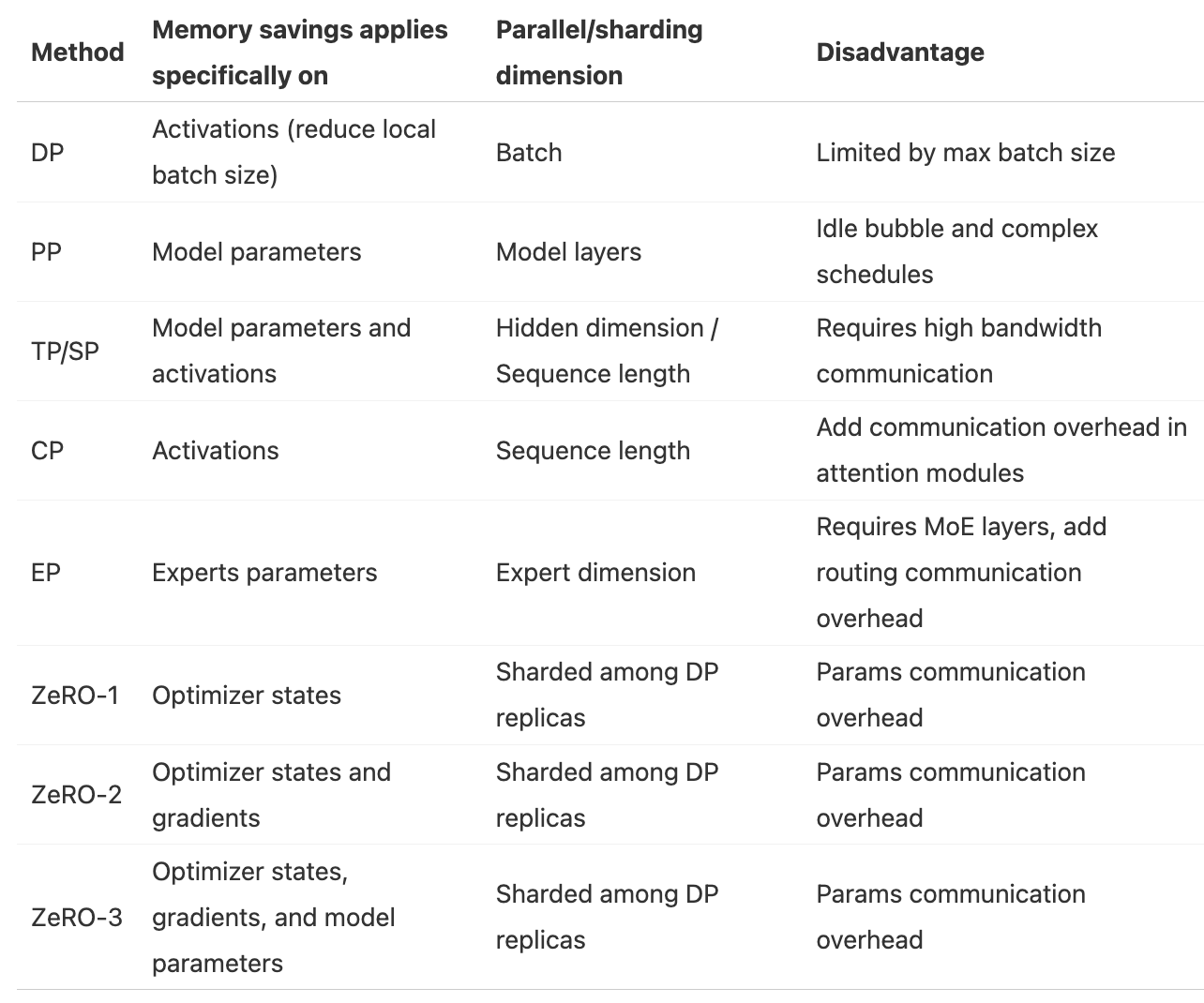
1.3. 影响范围
- TP & SP: 通过分片权重和激活值,影响整个模型的计算
- CP: 主要影响注意力层,因为那是需要跨序列通信的地方,而其他层则在分片的序列上独立运行
- EP: 主要影响MoE层(这些层替换了标准的MLP块),而注意力和其他组件保持不变
- PP: 并不特别针对任何子模块或组件
- ZeRO: 并不特别针对任何子模块或组件
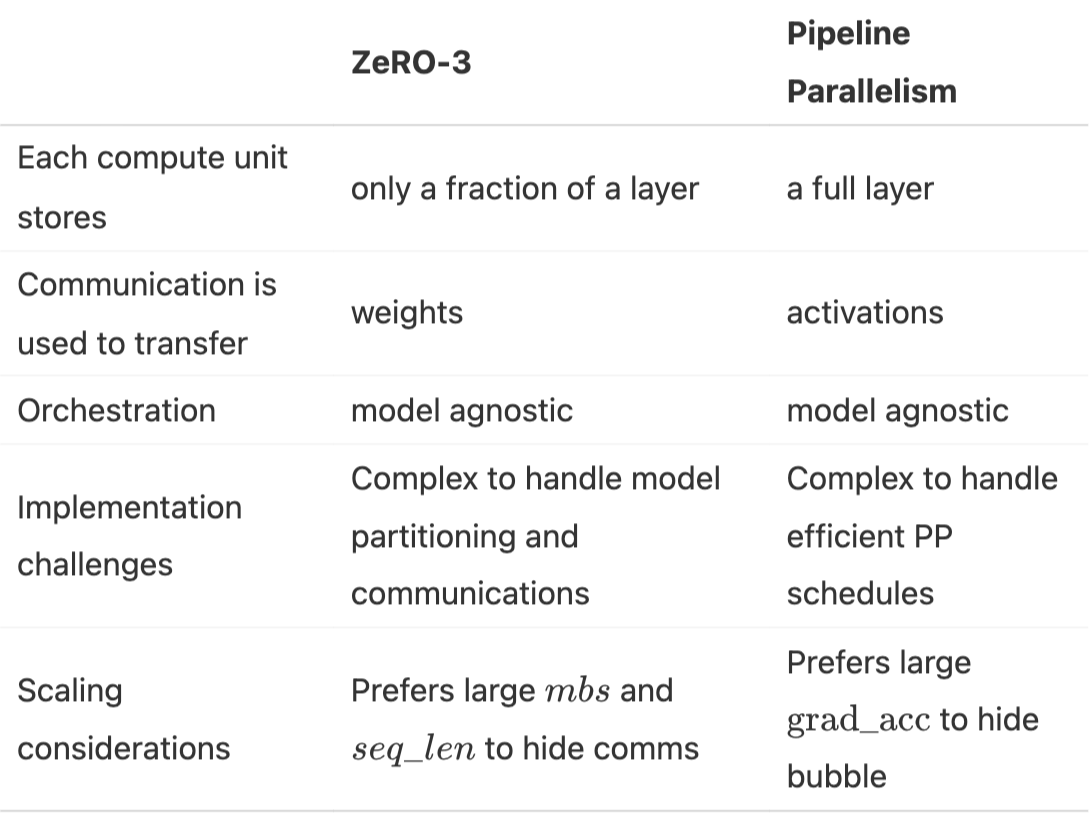
1.4. PP vs ZeRO-3
共同点:都是将模型权重分割到多个 GPU 上,并沿着模型深度轴进行通信和计算的方法,每个设备上都会计算完整的层操作
不同点:
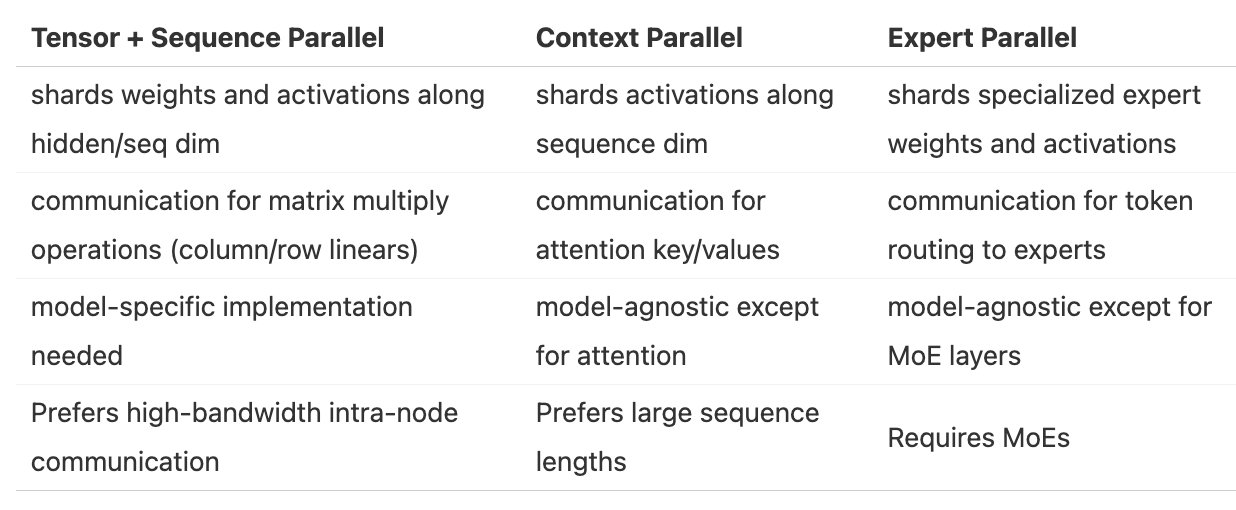
1.5. TP & SP vs CP vs EP
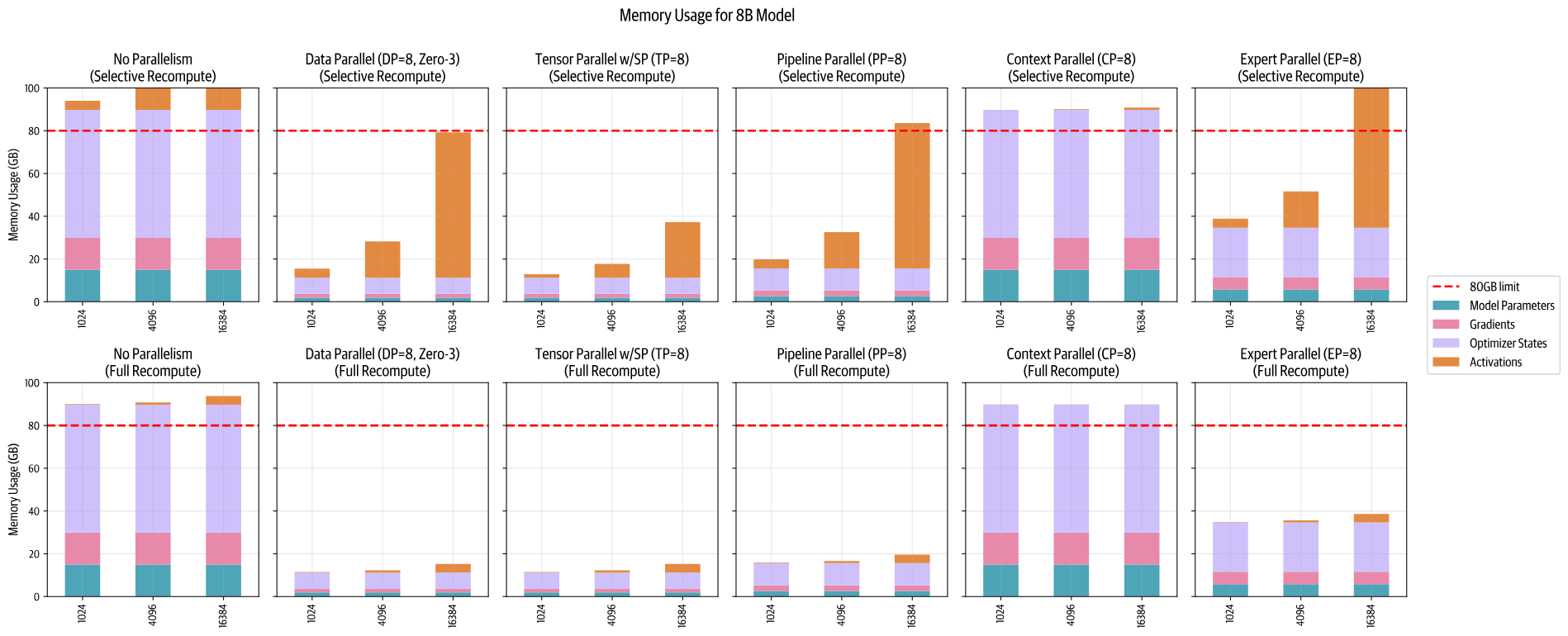
1.6. 每种并行策略节约内存的对比
2. 最佳训练配置
考虑点
- 考虑到计算集群的各种物理属性,网络带宽,每个节点的GPU数,每个GPU的显存大小
- 考虑模型大小
- 考虑批次大小
2.1. Step1: Fitting a Training Step in Memory / Fit a full model instance on our GPUs
- GPU资源多
- 低于10B参数的模型
- 在8个GPU上使用单一的并行策略
- e.g. Tensor Parallelism or ZeRO-3/DP with Full Recompute across 8 GPUs
- 在8个GPU上使用单一的并行策略
- 参数在10B-100B之间的模型
- 在8个GPU上使用混合并行策略
- TP(TP=8)+ PP
- TP(TP=8)+ ZeRO-3
- only ZeRO-3
- 在8个GPU上使用混合并行策略
- 在512个以上的GPU规模下
- 由于通信成本,纯数据并行/ZeRO-3会开始变得低效,此时最好将数据并行与张量并行或流水线并行结合使用
- 在1024个以上的GPU规模下
- 推荐的配置可以是张量并行(TP=8)结合数据并行(ZeRO-2)和流水线并行
- 特别考虑
- 对于超长序列:CP
- 对于MoE架构:EP
- 低于10B参数的模型
- GPU资源少
- 完全的激活值重新计算用时间换空间 (训练有些缓慢)
- 增加梯度累积来处理更大的批次
2.2. Step2: Achieving Target Global Batch Size
- 增加当前的全局批次大小
- 扩大 DP 或 梯度累积步骤
- 对于长序列,采用 CP
- 减少当前的全局批次大小
- 减少 DP
- 对于长序列,减少 CP
2.3. Step3: Optimizing Training Throughput / make sure the training is running as fast as possible
在内存和通信不是瓶颈的情形下,尝试以下操作:
- 扩大TP,使用快速的节点内带宽,直到并行度接近节点大小,从而减少其他并行方式的使用
- 在保持目标批次大小的同时,增加使用ZeRO-3的数据并行
- 当数据并行的通信开始成为瓶颈时,过渡到使用流水线并行
- 尝试逐一扩展不同的并行方式
- 实验几种微批次大小(mbs),以在最大全局批次大小(GBS)、模型大小、计算和通信之间寻求最佳平衡
2.4. Top Configurations
固定的实验设置: sequence length: 4096 gbs(global batch size): 1M tokens
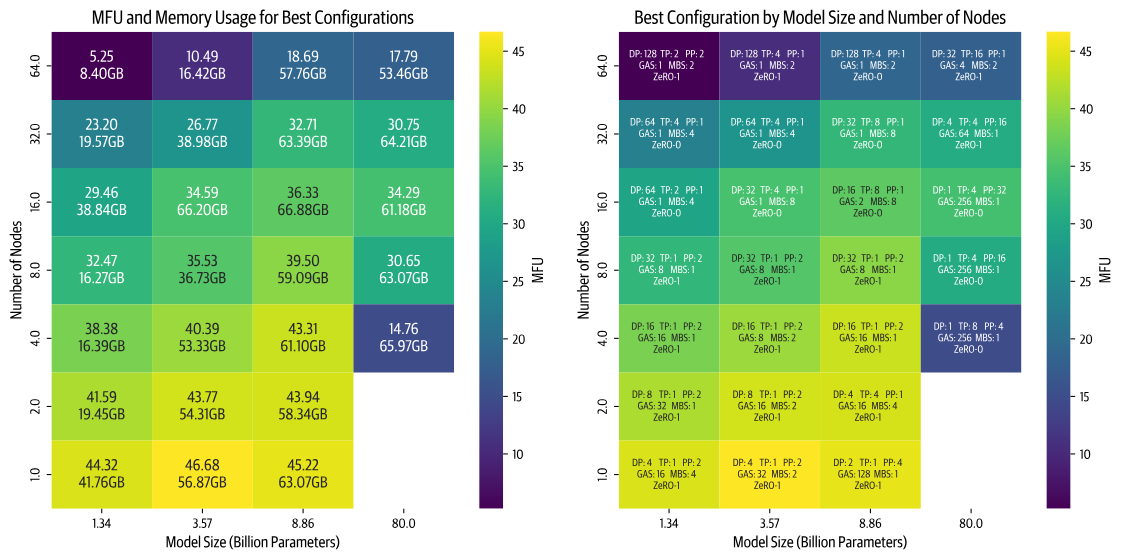
展示了不同的模型大小,计算节点数(每个节点有8个GPU)的最佳配置,颜色表示了MFU (Model FLOPs Utilization),其中FLOPs 为 Floating point operations per second,越亮的颜色代表更高的效率
包含的配置细节
- DP
- TP
- PP
- GAS (Gradient Accumulation Steps)
- MBS (Micro Batch Size)
- ZeRO
可获得的重要信息
- 随着节点数量的增加(更高的并行度),效率有所下降,对小模型更为明显(虽然可以通过增大批次大小来补偿小模型的尺寸,但我们受到全局批次大小限制100万的约束)
- 较大模型带来了不同的挑战。随着模型大小的增加,内存需求大幅增长。这在节点较少的情况下产生了两种情景:要么模型完全无法匹配内存大小,要么勉强匹配但由于接近GPU内存限制而运行效率低下(例如,80亿参数模型在4个节点上的训练)
- 性能在很大程度上取决于每种并行策略的具体实现的质量(当我们首次实现这两种并行策略时,张量并行(TP)优于流水线并行(PP)。在优化了我们的PP代码后,它成为了更快的选择。现在我们正在改进TP实现中的通信重叠,预计它将重新获得性能领先优势。)
3. 张量并行 Tensor Parallelism(TP)
3.1. TP原理
- ZeRO 对模型的参数、梯度和优化器状态进行了分片,但一旦激活值内存超出了我们的内存预算,我们就遇到了限制。
- 这时,我们引入张量并行(Tensor Parallelism, TP),这是一种不仅分片权重、梯度和优化器状态,还分片激活值的方法,而且在计算之前无需将它们全部聚集(gather)。
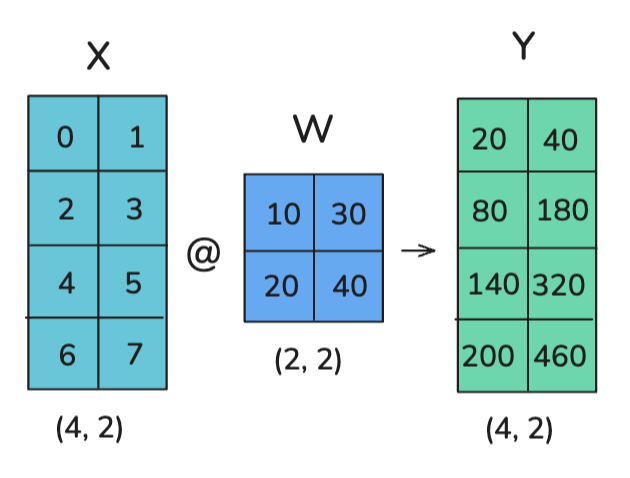
TP的原理是利用了矩阵乘法的数学性质:
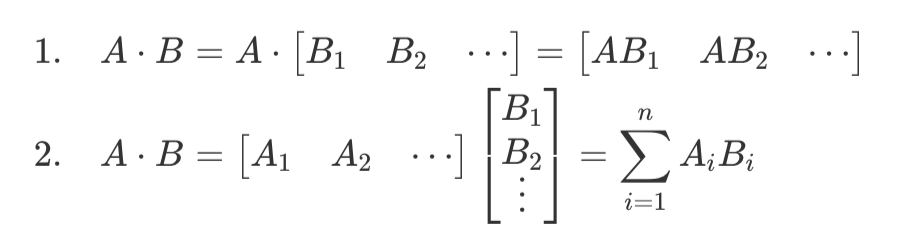
案例:如何对以下的计算进行TP
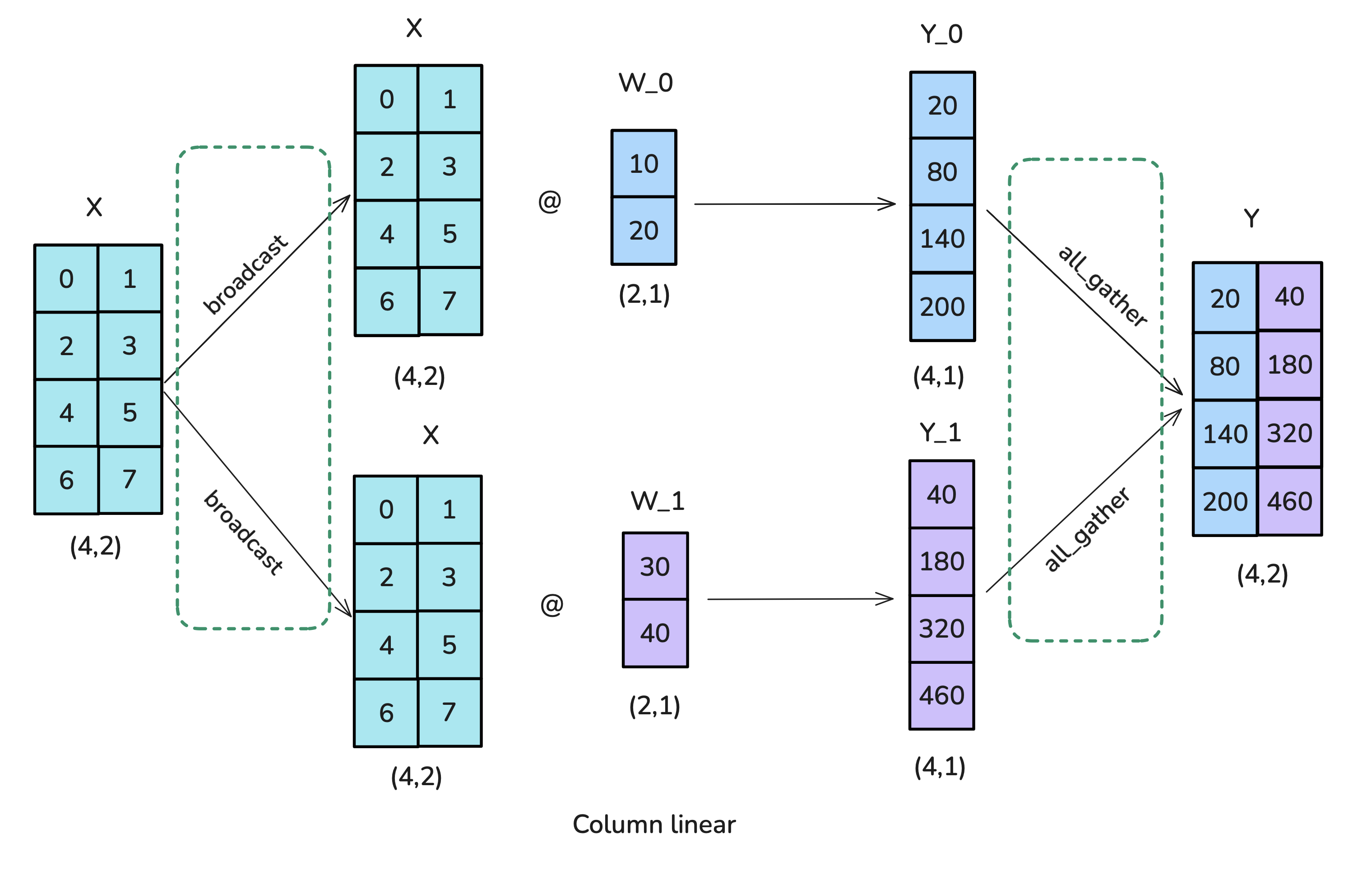
方案一:列分片 / column-wise sharding / column-linear
- 将 X 进行广播:broadcast
- 将 W 进行列分片
- 聚集得到 Y:all-gather
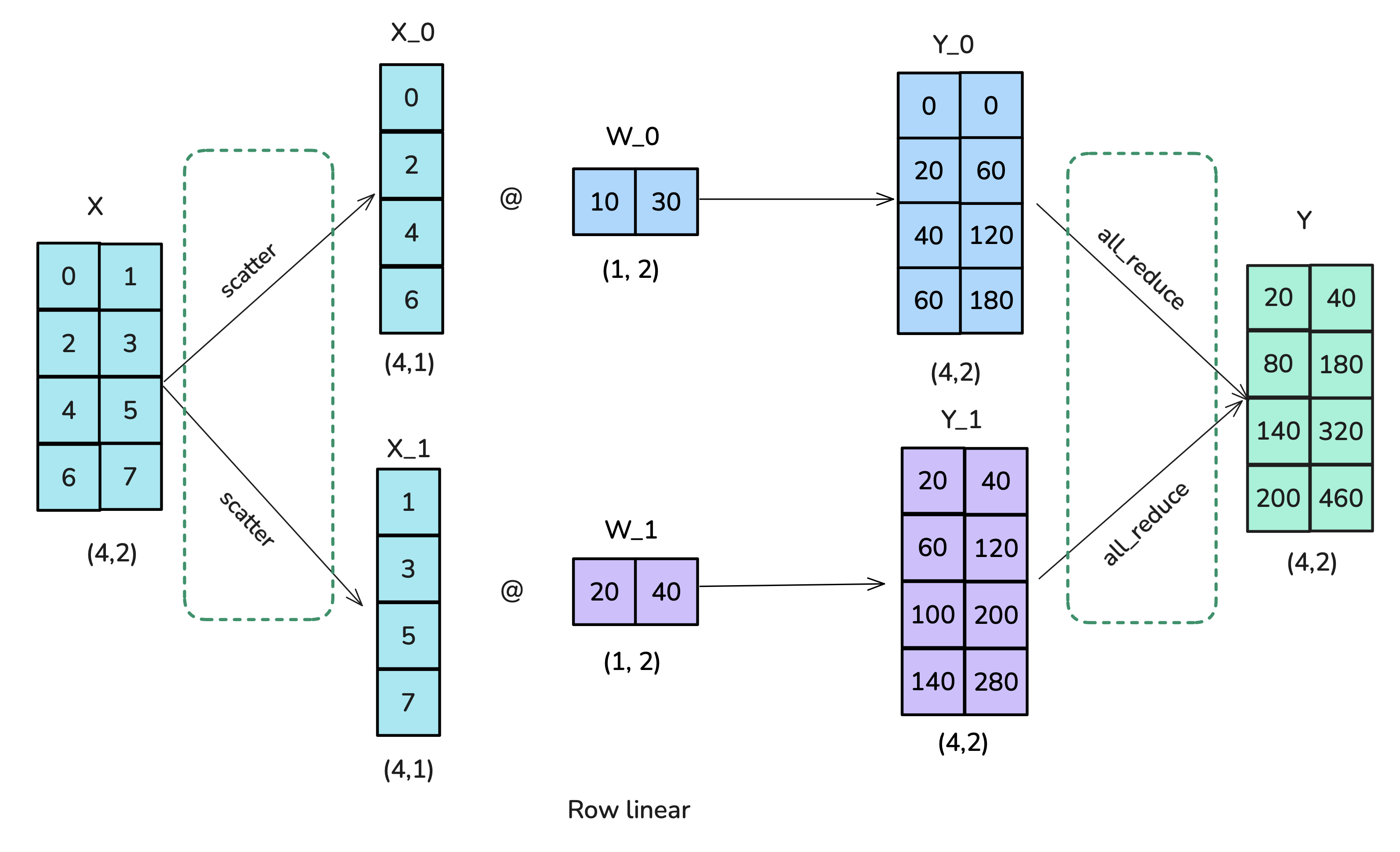
方案二:行分片 / row-wise sharding / row-linear
- 将 X 进行列分片:scatter
- 将 W 进行行分片
- 求和得到 Y:all-reduce
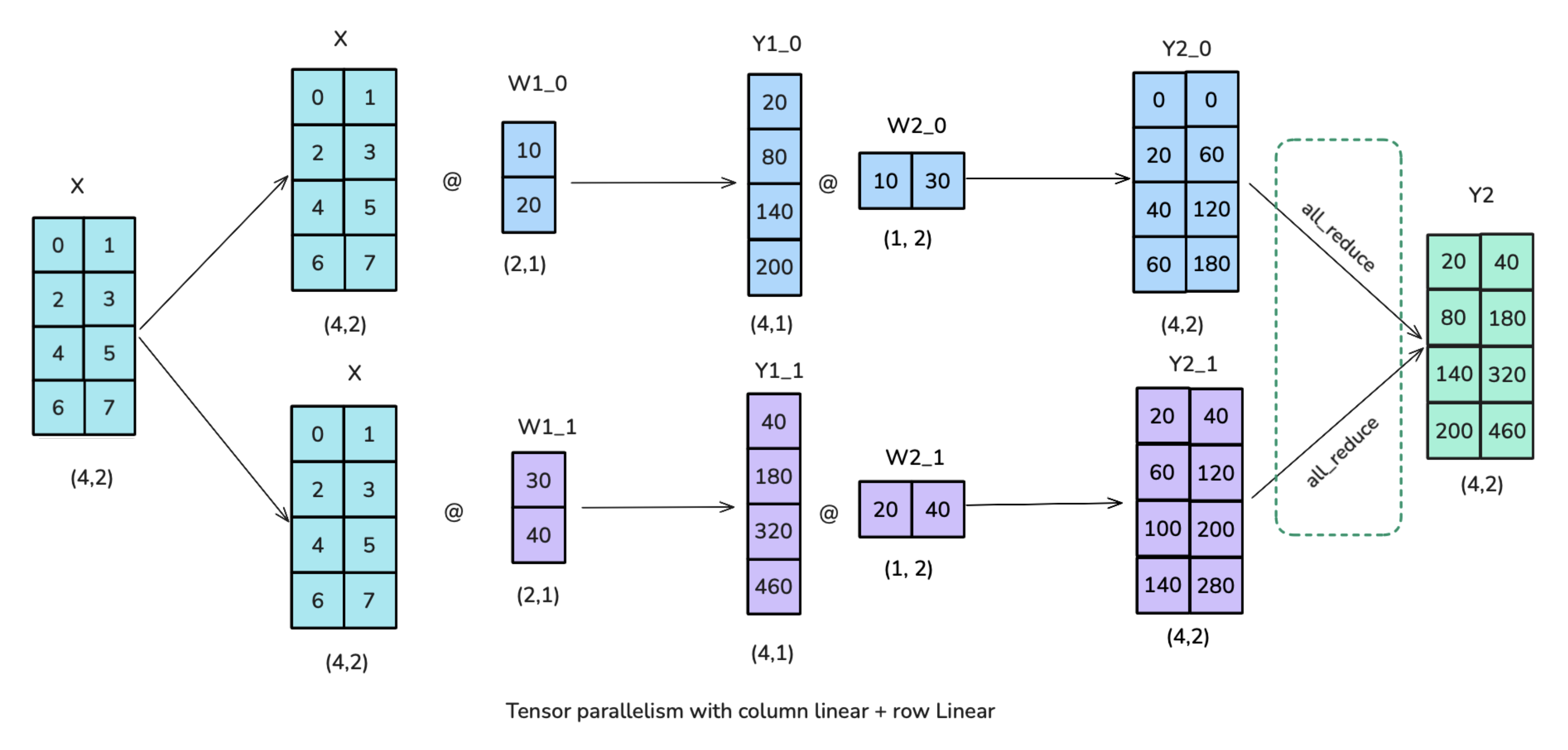
3.2. Transformer块的TP应用
Transformer两个主要的块:
- MLP / Feedforward layers
- MHA / Multi-Head Attention
3.2.1. MLP块:列分片 -> 行分片

- 图中的all-reduce操作是必要的,且不能和GPU计算重叠
- TP确实有助于减少矩阵乘法的激活值内存,但我们仍需要聚集完整的激活值用于LayerNorm的运算
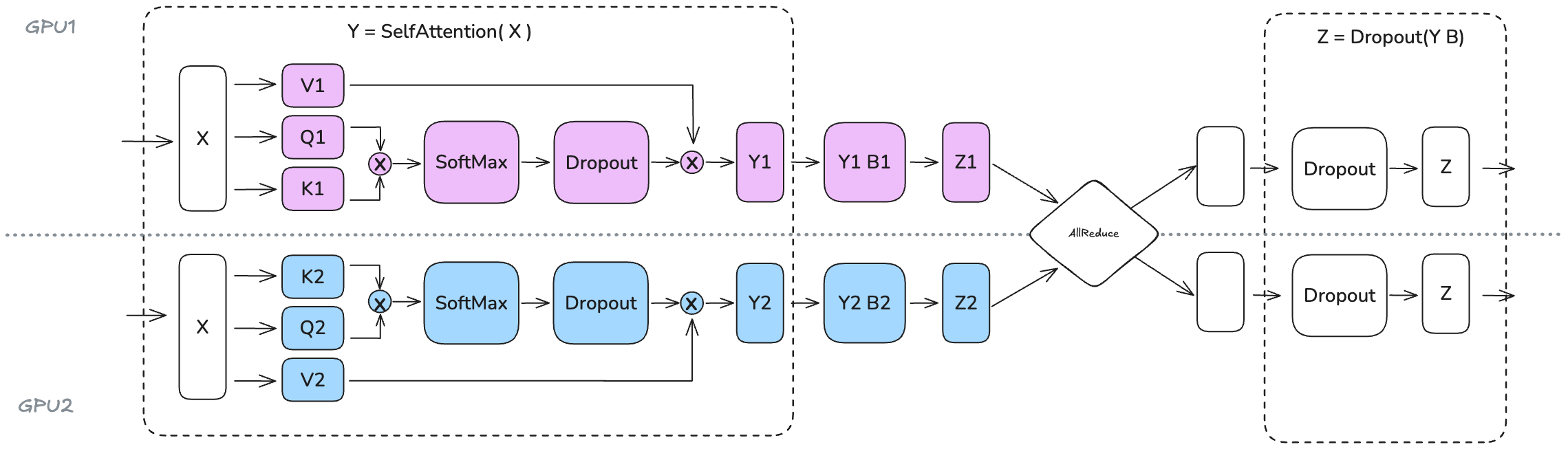
3.2.2. MHA块:
- Q、K、V矩阵:用列分片
- 多头:多头注意力的每个头本身是并行的,TP正好利用这一特性
- MQA (Multi-Query Attention):所有 Q 共享一组 K 和 V
- GQA (Grouped-Query Attention):多个 Q 共享一组 K 和 V(分组共享)
- 张量并行的列分片方式对 MQA 和 GQA 同样适用,因为 K 和 V 的共享特性不会影响头的独立计算
- 限制条件
- TP分片个数不要超过Q/K/V头的个数(否则不能独立的计算,需要额外的通信操作)
- GQA分片个数不要超过K/V的头数(否则需要复制K/V的头来保持同步),例如Llama-3 8B有8个K/V头,所以TP分片不要超过8
- O矩阵:用行分片
3.3. 缩放TP分片大小对吞吐量和内存的影响
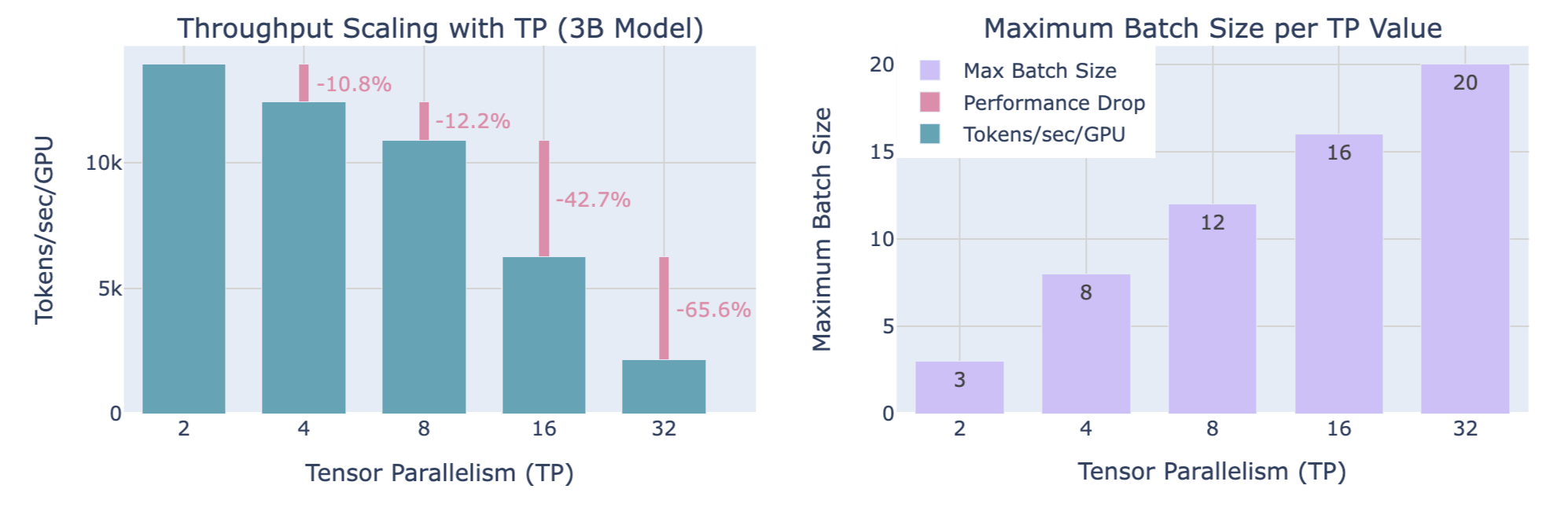
权衡
- 计算效率:增加的TP分片大小使得吞吐量降低(TP=8到TP=16,有显著的下降,TP=16到TP=32,有更陡的下降,下降程度随着TP的升高越发严重)
- 可用内存:增加的TP分片大小使得可处理更大的批大小
4. 序列并行 Sequence Parallelism (SP)
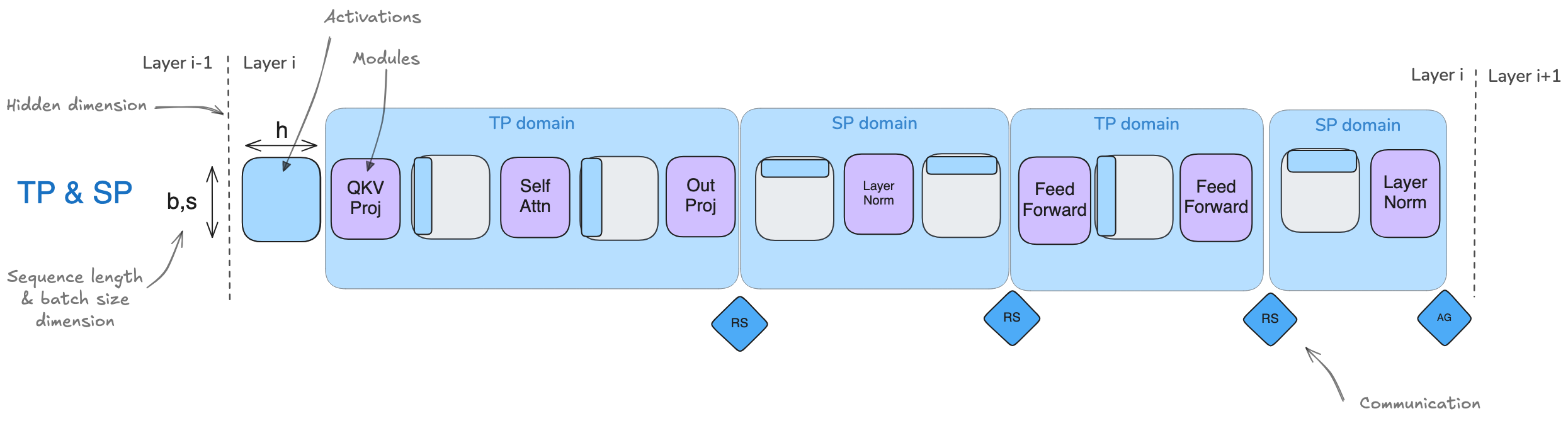
- 序列并行(SP)涉及对模型中未被张量并行(Tensor Parallelism, TP)处理的部分(例如 Dropout 和 LayerNorm)的激活值和计算进行分片,但分片是沿着输入序列维度(sequence dimension)进行的,而不是沿着隐藏维度(hidden dimension)。
- 此处的序列并行与张量并行紧密耦合,主要应用于 Dropout 和 LayerNorm 操作(For example, LayerNorm needs the full hidden dimension to compute mean and variance)
- 然而,当我们处理更长的序列时,注意力计算会成为瓶颈,这时需要引入一些技术,例如 Ring-Attention,这些技术有时也被称为序列并行,但我们将它们称为上下文并行(Context Parallelism),以区分这两种方法。因此,每次看到“序列并行”时,请记住它通常与张量并行一起使用(而上下文并行可以独立使用)。
4.1. TP Only 与 TP with SP
术语
- b : batch_size 批大小(张量的第一维度)
- s : sequence_length 序列长度(张量的第二维度)
- h : hidden_state 隐状态(张量的第三维度)
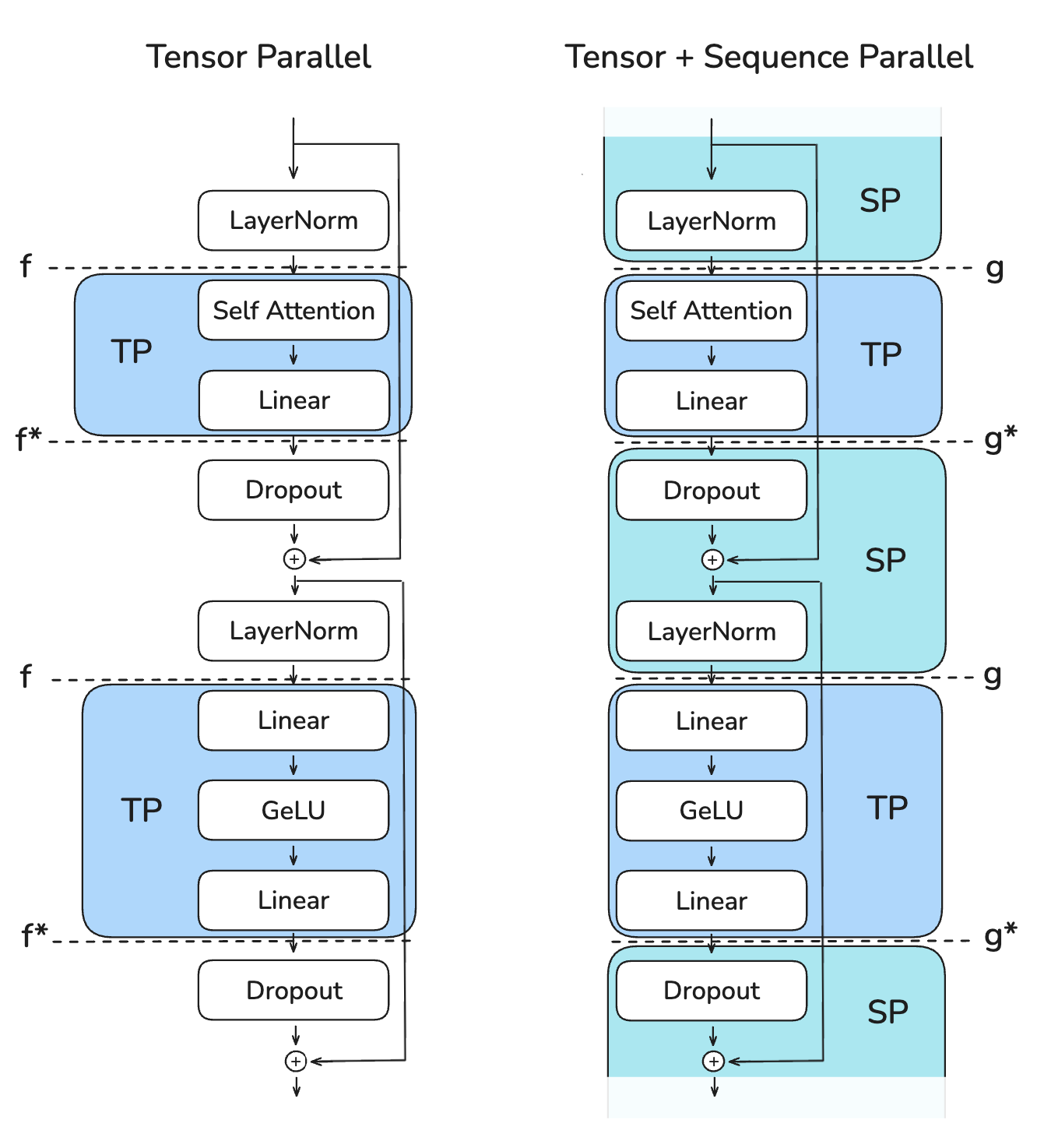
对比 TP Only 和 TP with SP:
- 序列并行最关键的优势是减少的需要存储的最大激活值大小
- TP Only:在多个点都需要存形状为(b, s, h)的激活值,激活值大小为 b * s * h
- TP with SP:激活值形状转为(b, s, h/k) 或 (b, s/k, h),最大激活值大小被减小为 b * s * h / k,其中k为并行数
- 两者在前向传播和反向传播中的通信开销都一样
- TP Only:每个Transformer块有2个all-reduce操作
- TP with SP:每个Transformer块有2个all-gather操作和2个reduce-scatter操作,但由于all-reduce = reduce-scatter + all-gather,所以相当于有2个all-reduce操作,和TP Only一致
4.1.1. 左图:TP Only
- f 与 f* 操作
- f 操作
- 前向传播中是空操作
- 反向传播中是all-reduce操作
- f* 操作
- 前向传播中是all-reduce操作
- 反向传播中是空操作
- f 操作
- 整体的张量变化
- (b, s, h) -> Full
- f
- (b, s, h/k) -> TP (列分片 -> 行分片)
- f*
- (b, s, h) -> Full
- f
- (b, s, h/k) -> TP (列分片 -> 行分片)
- f*
- (b, s, h) -> Full
4.1.2. 右图:TP with SP
- g 与 g* 操作
- g 操作
- 前向传播中是all-gather操作
- 反向传播中是reduce-scatter操作
- g* 操作
- 前向传播中是reduce-scatter操作
- 反向传播中是all-gather操作
- g 操作
- 整体的张量变化
- (b, s/k, h) -> SP
- g
- (b, s, h/k) -> TP (列分片 -> 行分片)
- g*
- (b, s/k, h) -> SP
- g
- (b, s, h/k) -> TP (列分片 -> 行分片)
- g*
- (b, s/k, h) -> SP
4.2. 吞吐量和内存占用
TP with SP 的 MLP 部分情况:
- 与TP Only一样,GPU通信不能与GPU计算重叠,这使得吞吐量严重依赖于通信带宽

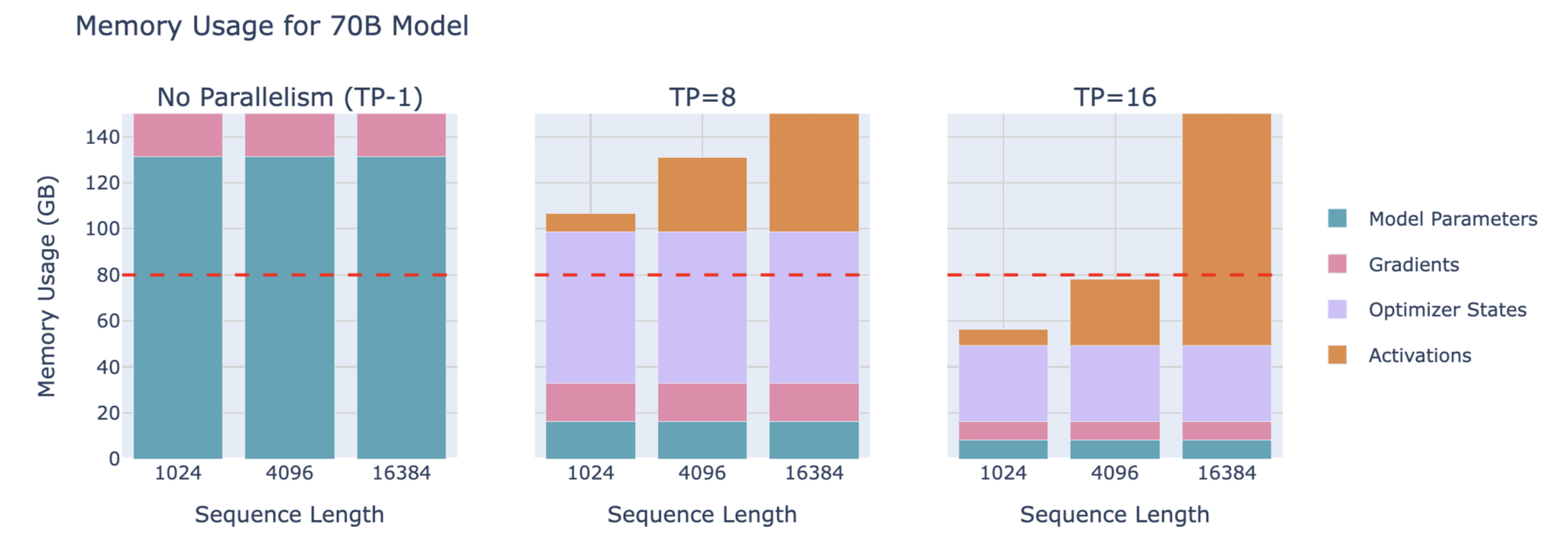
70B模型的内存占用:
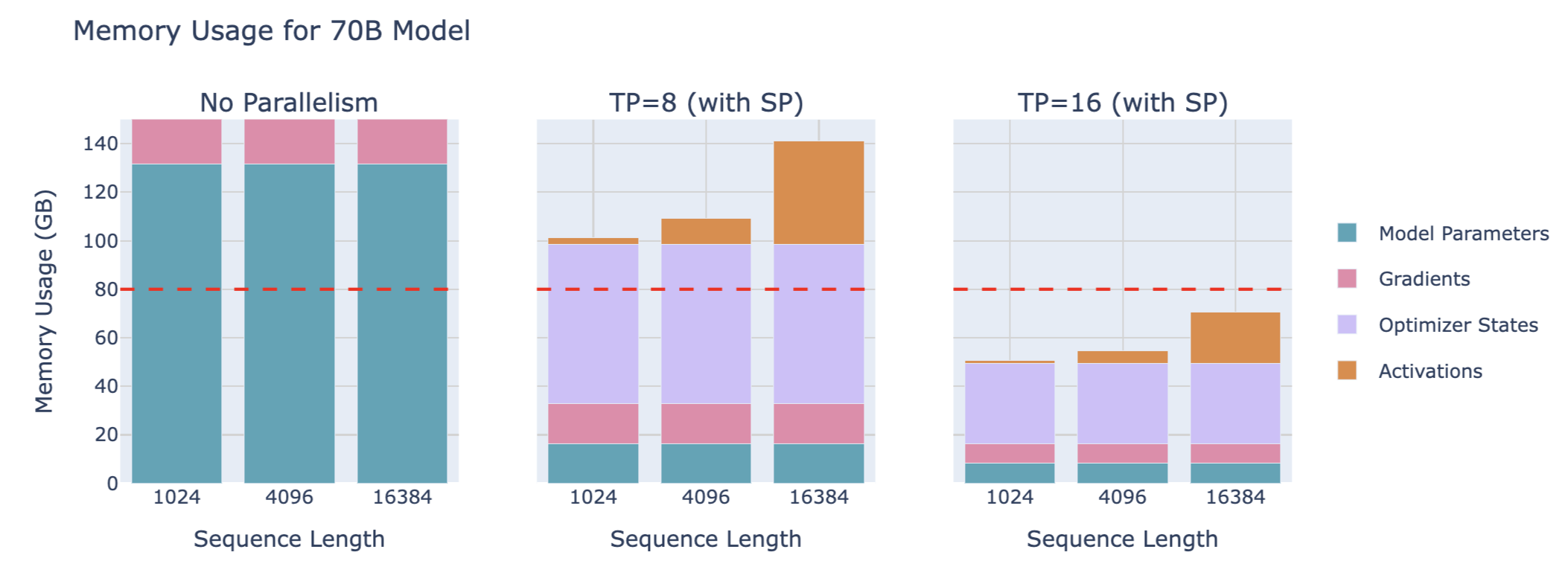
3B model with 4096 seqlen 的 TP with SP 缩放对吞吐量和内存利用的影响:
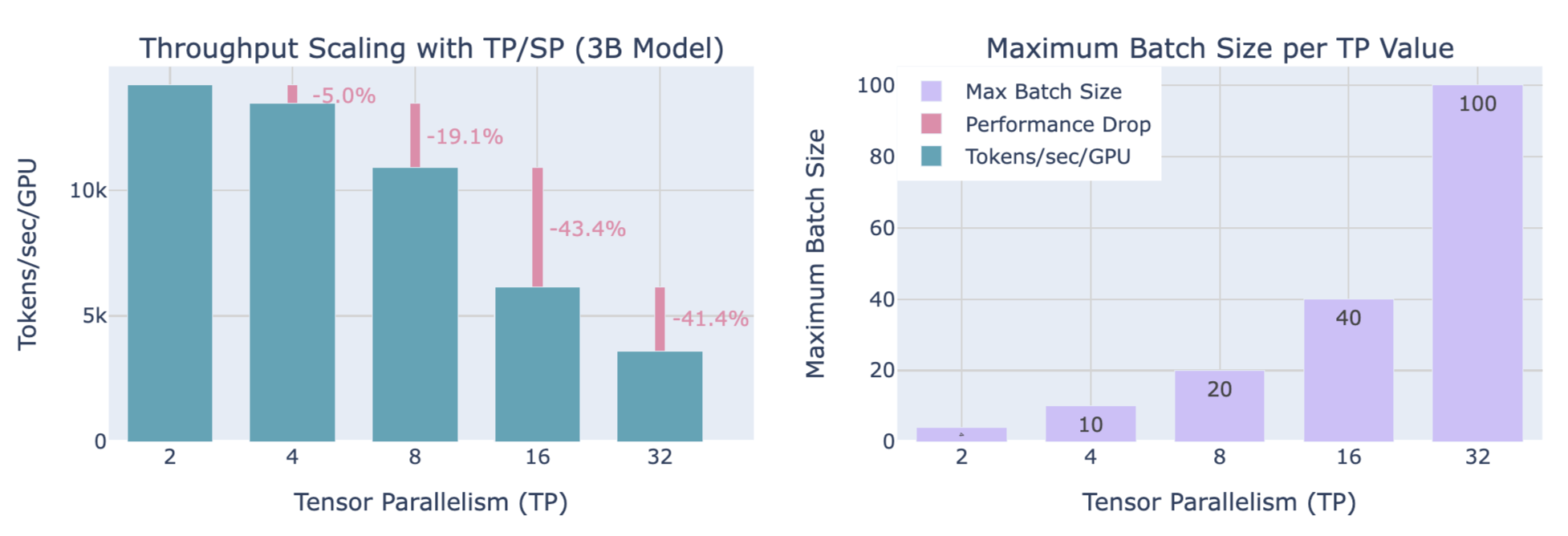
同样需要权衡吞吐量和内存占用
5. Context Parallelism (CP)
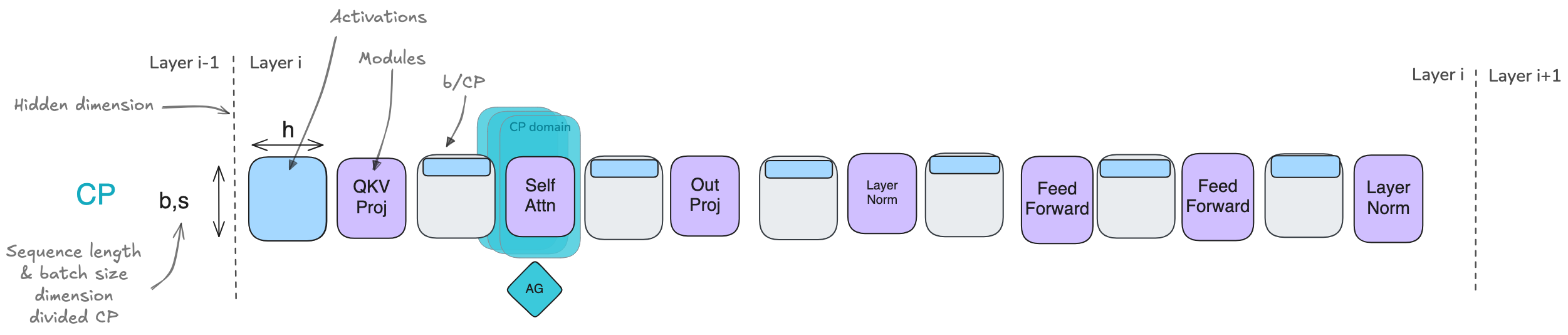
5.1. Ring Attention 环形注意力
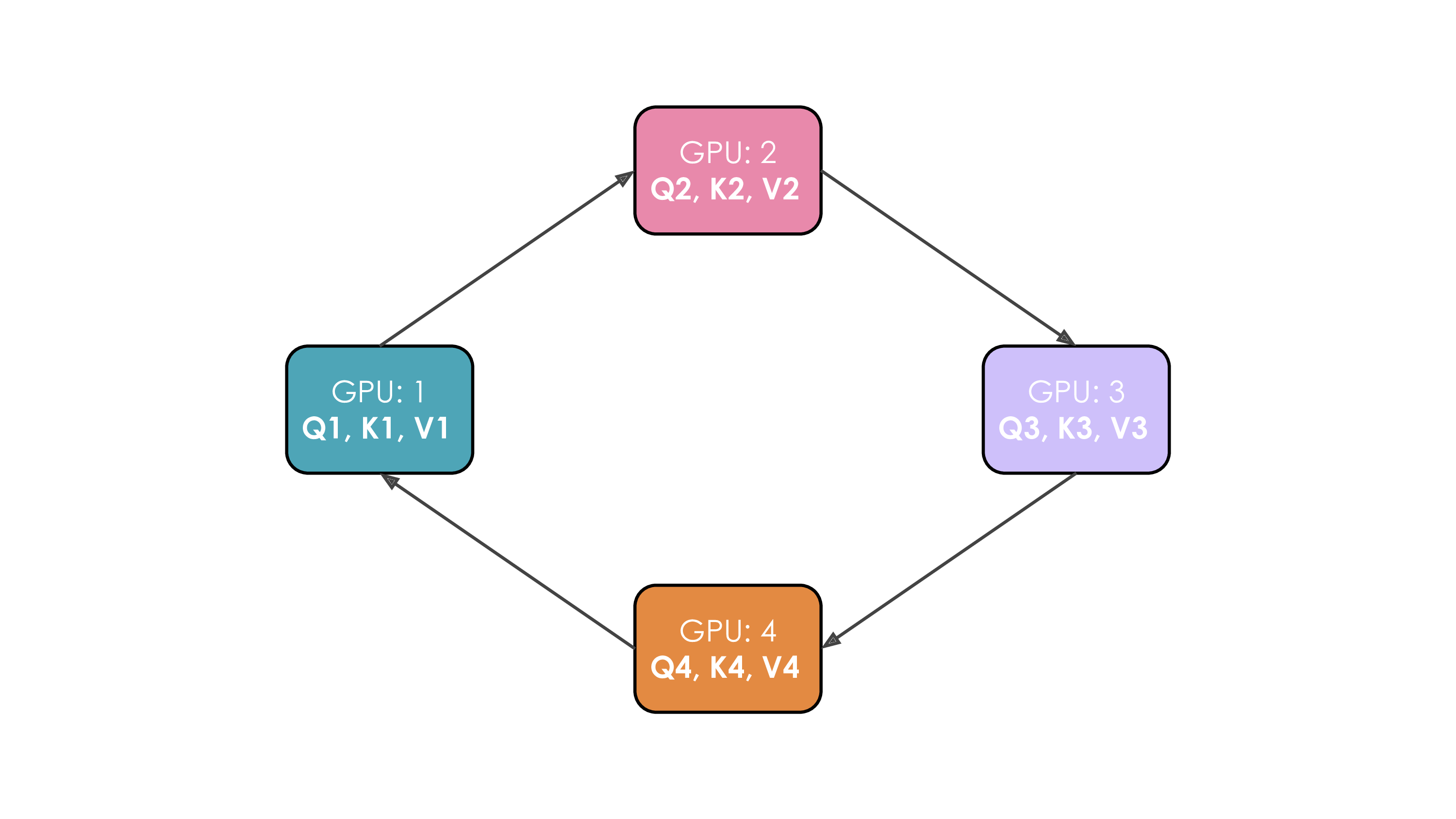
在每个时间步,每个GPU接连着执行这三个操作:
- 1.发送当前的K、V到下一个GPU
- 2.本地计算注意力得分
- 3.等待接收上一个GPU传来的K、V
朴素实现存在的问题:因为有掩码,所以数据呈下三角,而Softmax是按行计算的,各个GPU上的计算是不平衡的
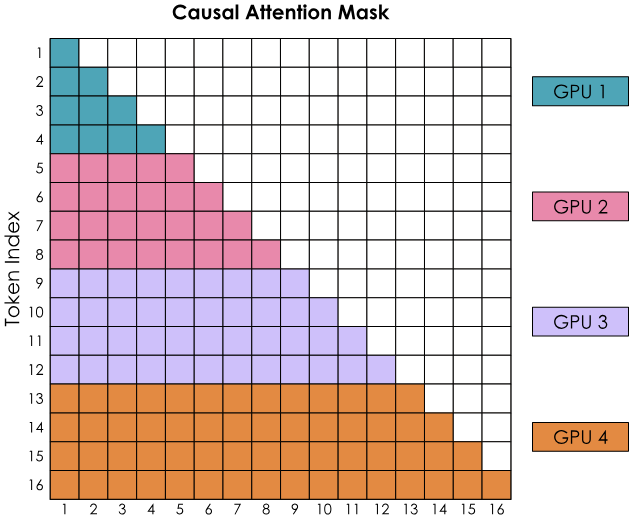
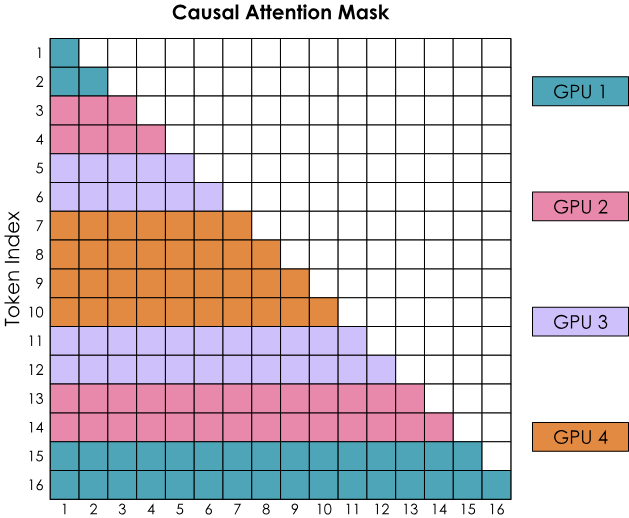
5.2. Zig-Zag Ring Attention
平衡计算的实现:不纯粹按顺序分配,而是把前面的和后面的token进行混合到一个GPU上
两种重叠计算和通信的方式
- all-gather实现:重组所有的KV在每个GPU上(以ZeRO-3的方式)
- 需要临时存储所有的KV对
- 通信只发生在第一步
- all-to-all(Ring)实现:环形依次收集每个GPU上的KV
- 只需要临时存储额外的一块
- 通信从头到尾,和计算重叠,有一些延迟开销


6. 流水线并行 Pipeline Parallelism (PP)
流水线并行:把模型的层分到多个GPU上,又被称为“层间并行”
6.1. 内存占用
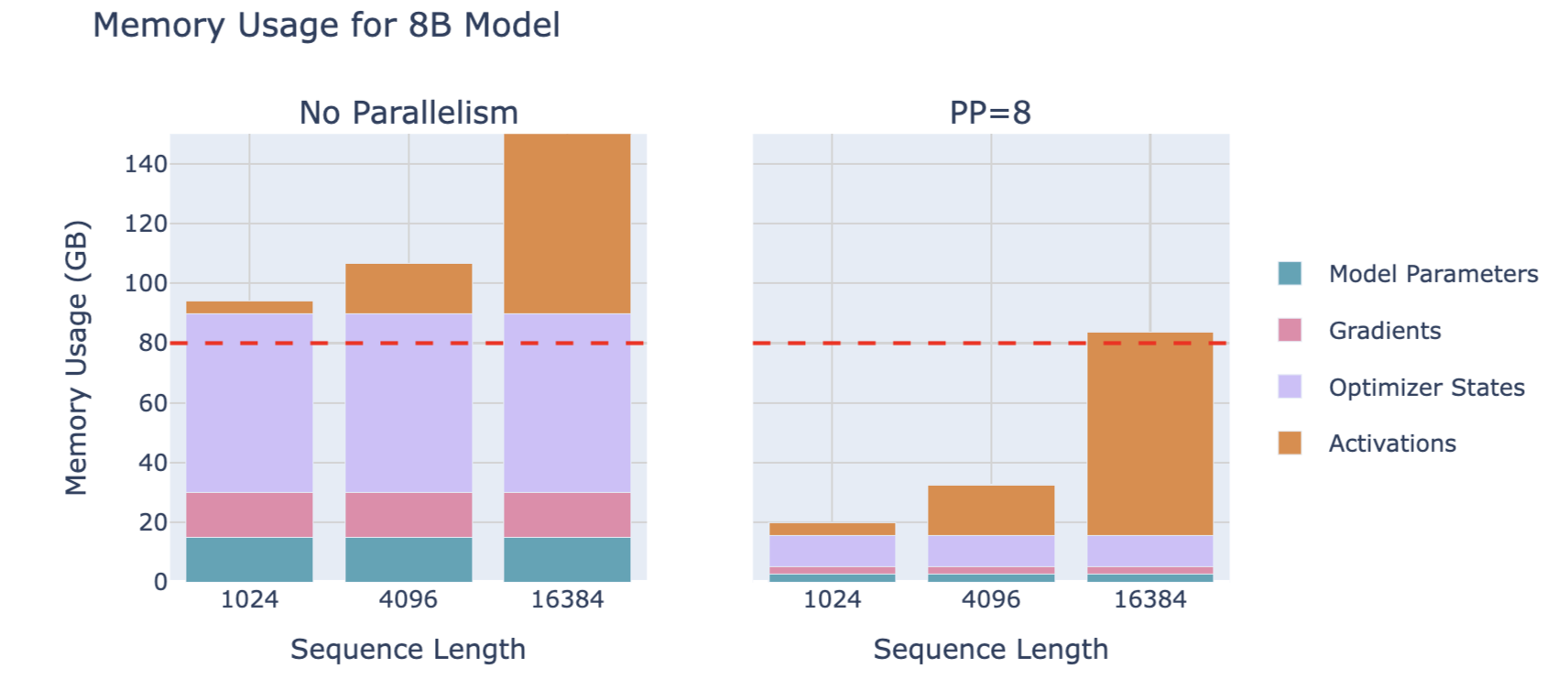
每个GPU仍需处理这批次的全部数据,只是在不同的层上,所以激活值占内存大小是完整的,激活值在一个GPU的层上处理完后被发送给下一个GPU,从而继续前向传播
6.2. 主要挑战:尽量避免GPU计算的闲置,提高GPU利用率
案例:16层的模型分布在4个GPU上
- tf : 前向传播的耗时
- tb : 反向传播的耗时
- 一个简单的假设:tb = 2 * tf
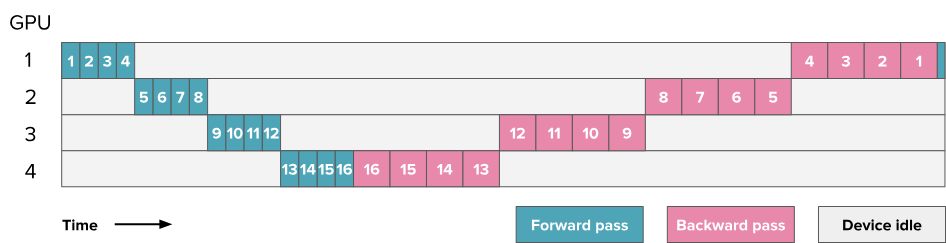
6.3. 朴素PP
Note:此处图中方块的数字编号代表层数,共16层,每4层被分在一个GPU上
- 理想总耗时:tideal = tf + tb
- 闲置时间:tpipeline_bubble = (p - 1) * (tf + tb),其中p为并行数
- 闲置时间与理想时间的比例:rbubble = (p - 1) * (tf + tb) / (tf + tb) = p - 1
6.4. all-forward-all-backward (AFAB) 方案 / forward then backword / F then B
Note:此处图中方块的数字编号不代表层数了,而是代表微批次,每批次被划分为8个微批次(9-16编号是下一个批次的微批次),每个方格代表4层,4个GPU上同一微批次就有16层
- AFAB是指等每个批次的所有微批次的前向传播都完成后,开启这个批次所有微批次的反向传播
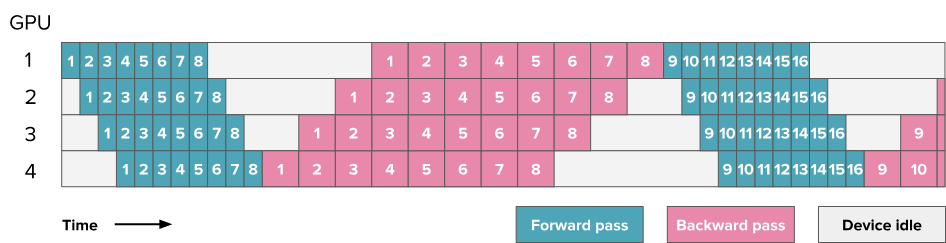
存在的问题:要存所有激活值(只有等前向传播都完成了,且该微批次的反向传播完成后才能释放该微批次的激活值)
6.5. One-forward-one-backward (1F1B) and LLama 3.1 schemes 方案
6.5.1. non-interleaved schedule 非交错调度 (默认是此)
Note:此处图中方块的数字编号不代表层数了,而是代表微批次,每批次被划分为8个微批次(9-16编号是下一个批次的微批次),每个方格代表4层,4个GPU上同一微批次就有16层
- 和AFAB相比,只要有一个微批次的前向传播完成了,就开启这个微批次的反向传播
- 每个微批次和其他微批次不进行同步
- 非交错式调度可分为三个阶段。第一阶段是热身阶段,处理器进行不同数量的前向计算。在接下来的阶段,处理器进行一次前向计算,然后是一次后向计算。最后一个阶段处理器完成后向计算。
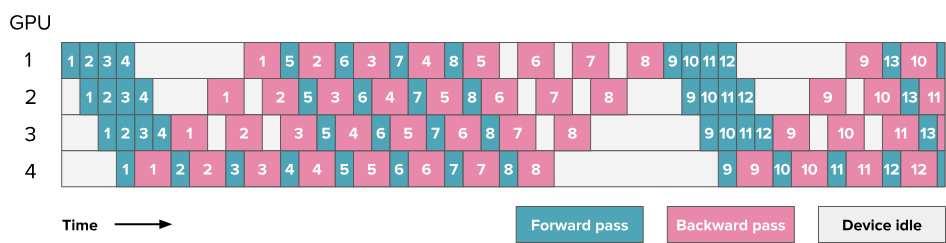
- 只存部分激活值(只要该微批次自己的前向传播完成,就可开启该微批次的反向传播来释放激活值,此时其他微批次的前向传播还在进行)
- 1F1B改善了内存占用但没有改善闲置问题
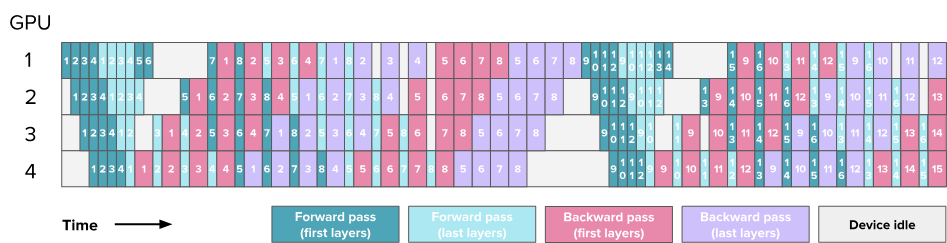
6.5.2. Interleaving stages / interleaved schedule 交错式调度
Transformer两个主要的块:
- MLP / Feedforward layers
- MHA / Multi-Head Attention
Note:这里图中的每个块代表一个计算块,绿色块代表注意力块MHA的前向传播,青色块代表前馈神经网络MLP的前向传播,粉色块代表MHA的反向传播,紫色块代表MLP的反向传播,块上的数字表示微批次ID,每批次被划分为8个微批次,每个方格代表4层,4个GPU上同一微批次就有16层
7. Expert Parallelism (EP)
MoE(Mixture-of-Experts)基础: https://huggingface.co/blog/moe
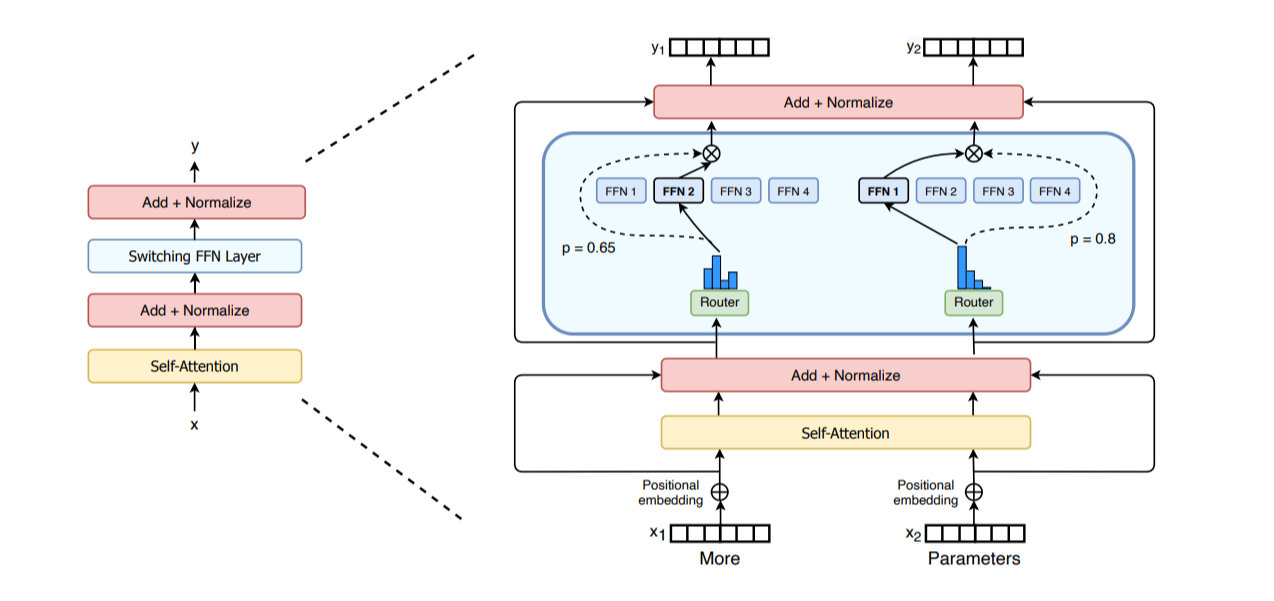
Expert Parallelism (EP):在专家维度上并行
- 每个专家的FFN Layer是完全独立的
- 比起TP更轻量级,因为不需要切分矩阵乘法,只需要路由hidden states到正确的专家
- 一般会与其他并行策略一起采用,如DP